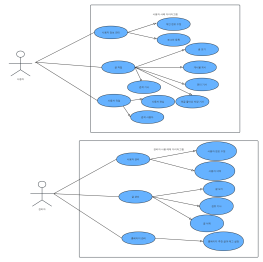
데이터 수집 하위 시스템 사용 사례 다이어그램
2024-11-18 11:08:13 95 0 신고 0
0

전체 내용을 보려면 로그인하세요
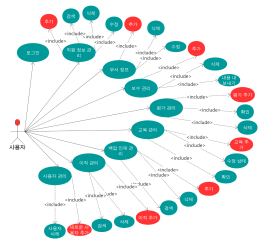
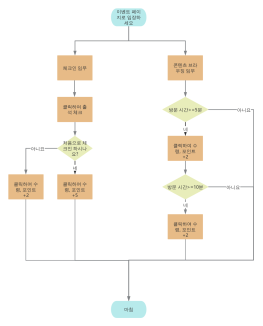
이 문서는 '데이터 수집 하위 시스템 사용 사례 다이어그램'에 대한 소개입니다. 이 다이어그램은 데이터 수집 프로세스를 관리하고 최적화하기 위한 다양한 클래스와 인터페이스의 상호작용을 설명합니다. 주요 구성 요소로는 GcsPatrolJobService, GcsAcquisitionProcessService, GcsRobotCamera 등이 있으며, 이들은 데이터 수집과 관련된 다양한 작업을 수행합니다. 각 클래스는 특정 기능을 담당하며, 예를 들어 GcsPatrolJobService는 기계 상태를 관리하고, GcsRobotCamera는 장치 연결을 처리합니다. 이 다이어그램은 복잡한 데이터 수집 시스템을 효율적으로 운영하기 위한 구조적 청사진을 제공합니다.
작성자의 다른 창작물
개요/내용
GcsPatrolJobServicePlugin
- GcsPatrolJobInterface *pGcsPatrolJobInterfaceM;- GcsPatrolJobServiceManager *pGcsPatrolJobServiceManagerM;- GcsAcquisitionProcessServiceManager *pGcsAcquisitionServiceManagerM;
TimerState (abstract class)
# onEntry(QEvent *event)# onExit(QEvent *event)- handleTimeOut();
StatePlanRobotPath
GcsJobDynData
GcsDiseaseData
CaptureModeAbs
# angleListM : QList<int>
+ getScanMode() : int+ getAngleList() : QList<int>&
GcsPatrolJobService
+ startMachine();+ stopMachine();+ setStateMachineProcess() : void- initializeCoreConnections(); - initializePatrolStageScene();- initializePrimaryStates(); - initializeStateTransitions();- initializeChildStates();
CrossMode
GcsPatientData
StatePlanEndPath
MeterMode
GcsPatrolStageScene
+ createScene() : void
StateCheckInitState
StateJobFinished
StoptoJobService
+ setStateMachineProcess :void
GcsJobResultData
N
1
StoptoMeasureWidget
GcsJobData
InspectionGadgetWidget
+ productChangedSlot(): void
GcsPatrolMission
+ generateJob(int patientIdP) :bool+ getNewJob(S_JOB_DETAIL *pJobDetailP) : bool
GcsPatrolJobInterface
- createService() : void
StateCheckSchedule
GcsRobotCamera
openDevice() :boolcloseDevice() : boolisOnLine() : bool。。。
GcsPatrolJobServiceManager
BaseMeasureWidget
- GcsPatrolJobInterface *pGcsPatrolJobInterfaceM;
# enableAllWidgets(boolisEnableP) :void# promptSelectionItem() : bool# assembleData() : void# changeCheckScheduleStatusWidgets() : void# clearSelectedStatus() : void
GcsDoctorData
StateHandleJob
SpectaclesLensMeasureWidget
Data collection background service
GcsDbDataLoaderAbs
+ load() : bool
StateCheckRobotState
PresetMode
Aggregate multiple concrete classes
SpectaclesLensJobService
+ setStateMachineProcess : void
Data measurement interface
StateAdjustBackGround
GcsAcquisitionProcessServiceManager
+ createThreads() :void+ initialize() : void
GcsAcquisitionProcessService
+ startService() : void
GcsJobResultDynData
LineMode
GcsPatrolRobot
+ connectDevice() : bool+ resetRobotRangePosition() : void+ saveRobotXRangePosition() : bool+ saveRobotYRangePosition() : bool+ isXPositionInPlace() : bool+ isYPositionInPlace() : bool+ setDefaultCenterPosition() : void。。。
즐거움

즐거움
즐거움

즐거움
즐거움
0 댓글
다음 페이지