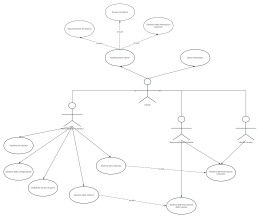
Diagramma dei casi d'uso del sottosistema di raccolta d...Diagramma dei casi d'uso del sottosistema di raccolta dati
2024-11-18 11:08:23 69 0 Segnala 0
0

Accedi per visualizzare il contenuto completo
Altre creazioni dell'autore
Schema/Contenuto
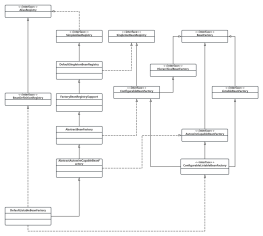
GcsPatrolJobServicePlugin
- GcsPatrolJobInterface *pGcsPatrolJobInterfaceM;- GcsPatrolJobServiceManager *pGcsPatrolJobServiceManagerM;- GcsAcquisitionProcessServiceManager *pGcsAcquisitionServiceManagerM;
TimerState (abstract class)
# onEntry(QEvent *event)# onExit(QEvent *event)- handleTimeOut();
StatePlanRobotPath
GcsJobDynData
GcsDiseaseData
CaptureModeAbs
# angleListM : QList<int>
+ getScanMode() : int+ getAngleList() : QList<int>&
GcsPatrolJobService
+ startMachine();+ stopMachine();+ setStateMachineProcess() : void- initializeCoreConnections(); - initializePatrolStageScene();- initializePrimaryStates(); - initializeStateTransitions();- initializeChildStates();
CrossMode
GcsPatientData
StatePlanEndPath
MeterMode
GcsPatrolStageScene
+ createScene() : void
StateCheckInitState
StateJobFinished
StoptoJobService
+ setStateMachineProcess :void
GcsJobResultData
N
1
StoptoMeasureWidget
GcsJobData
InspectionGadgetWidget
+ productChangedSlot(): void
GcsPatrolMission
+ generateJob(int patientIdP) :bool+ getNewJob(S_JOB_DETAIL *pJobDetailP) : bool
GcsPatrolJobInterface
- createService() : void
StateCheckSchedule
GcsRobotCamera
openDevice() :boolcloseDevice() : boolisOnLine() : bool。。。
GcsPatrolJobServiceManager
BaseMeasureWidget
- GcsPatrolJobInterface *pGcsPatrolJobInterfaceM;
# enableAllWidgets(boolisEnableP) :void# promptSelectionItem() : bool# assembleData() : void# changeCheckScheduleStatusWidgets() : void# clearSelectedStatus() : void
GcsDoctorData
StateHandleJob
SpectaclesLensMeasureWidget
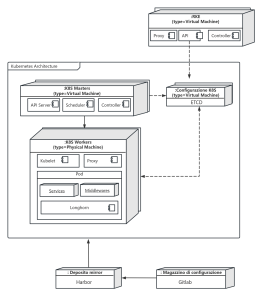
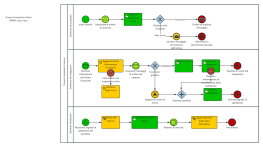
Data collection background service
GcsDbDataLoaderAbs
+ load() : bool
StateCheckRobotState
PresetMode
Aggregate multiple concrete classes
SpectaclesLensJobService
+ setStateMachineProcess : void
Data measurement interface
StateAdjustBackGround
GcsAcquisitionProcessServiceManager
+ createThreads() :void+ initialize() : void
GcsAcquisitionProcessService
+ startService() : void
GcsJobResultDynData
LineMode
GcsPatrolRobot
+ connectDevice() : bool+ resetRobotRangePosition() : void+ saveRobotXRangePosition() : bool+ saveRobotYRangePosition() : bool+ isXPositionInPlace() : bool+ isYPositionInPlace() : bool+ setDefaultCenterPosition() : void。。。


Raccogliere

0 Commenti
Pagina successiva
Consigliato per te
vedi di più